The Full Story
Detailed Background
The goal of this project is to develop a robot by May 2022 capable of autonomously collecting airflow and environmental data and transmitting it over a wireless telecommunication from a low-power wide-area network (LPWAN) to a cloud server every 5 to 10 minutes. Information will be retrievable via two modes:
1) Digitally aggregated data displayed on a GUI on a private web server 2) Local retrieval via USB for more granular details.
Hardware
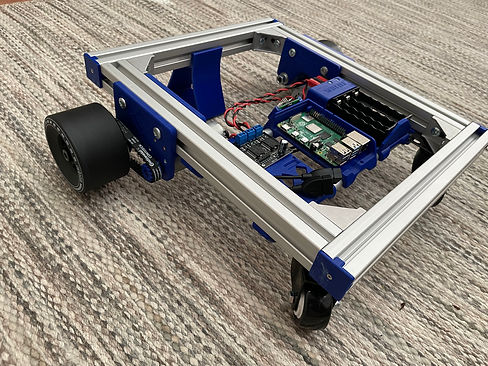
The foundation for Ventus is the SCUTTLE platform, which originates from a critical need at Texas A&M for a flexible, extensible, durable, and affordable robot to support the university's Mobile Robotics Undergraduate Engineering course. The entire robot platform functions off a Raspberry Pi 4, which has IO support for external connections.
To provide the autonomous operation of Ventus, a SICK LiDAR will be installed, working alongside an algorithm that will provide the robot to navigate around the perimeter of the indoor agriculture facility without any directional input from the user.
To capture sensor data, 6 SMD airflow sensors will be placed on a spherical base that will provide potential 3D airflow measurement data. An additional sensor board is installed to provide environmental data (temp., humidity, and pressure).
To transmit collected data, Ventus utilizes a Pycom wireless module that communicates with a Sigfox base station located in College Station. With the battery efficiency and reduced maintenance, the Sigfox LPWA (Low Power Wide Area) network is an excellent choice for the potential rural applications Ventus will face. Data security will be provided through end-to-end encryption, from Ventus to the website.
Software
Throughout the project, Python will the main programming language, used for many different applications ranging from operating the LiDAR to the Pycom wireless module. In order to compile the code required for the project, compilers and text editors such as Atom SCE and VS Code are currently being utilized by the software and hardware leads.
With the sensors described in the hardware section, a custom PCB will be developed that will both fit within the spherical sensor array as well as provide connections for all 6 SMD airflow sensors. To create the PCB, the design software Altium will be used to create both the preliminary and final designs.
